
Raspberry Pi
Approved Reseller
Approved Reseller
Approved Reseller
Approved Reseller

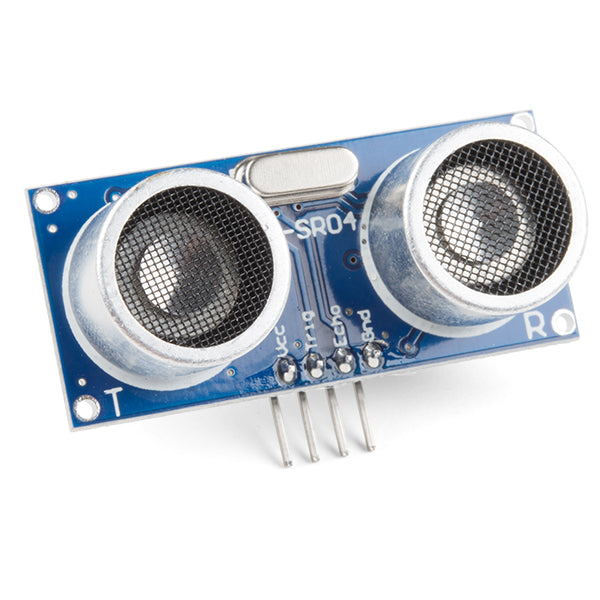
A veces es útil detectar objetos y medir distancias con un sensor. El más común y más utilizado para esta tarea es el sensor ultrasónico HC-SR04. Para ello necesitaremos una tensión de 5V y unos resistores para empezar a medir.
El funcionamiento de este sensor se basa en la propagación de las ondas sonoras. Cuando uno habla produce vibraciones que se dispersan en el medio en donde hablamos, en este caso el aire. Las ondas sonoras al chocar con un objeto rebotan y se propagan en direcciones distintas dependiendo del objeto y la distancia. Cuando usas el sensor ultrasonico pasa lo mismo que con tu voz, las vibraciones que produce se expanden y rebotan, de modo que, dependiendo de cuánto se tardó en regresar la onda, es la distancia que tiene el sensor al objeto.

El sensor HC-SR04 los hace de la misma manera, por un lado tiene un altavoz especial que envía ráfagas de alta frecuencia que no puede percibir el oido humano, alrededor de 40kHz, y en el receptor detecta cuando esas ondas regresan, de modo que toma la diferencia de tiempo y la convierte en un pulso que se pueda interpretar, la longitud de dicho pulso será la distancia que hay al objeto.
Los sensores ultrasonicos se utilizan en robots autónomos, midiendo liquidos o en detección de personas. Son económicos y eficaces en la mayoria de situaciones y son fáciles de usar. Para este ejemplo vamos a utilizar tu micro:bit para medir distancias en centímetros.
Desarrollo del programa
Para poder utilizar tu sensor necesitarás agregar una extensión. Para ello, ve a la sección Avanzado. Ahi busca el apartado que dice Extensiones y busca en la pantalla la que dice “Sonar”

Crea una nueva variable desde de la sección de “Variables”, puedes darle el nombre que quieras. “Distancia” seria el más adecuado.

Ahora agrega un bloque “establecer Distancia para” y dentro del bloque agrega el bloque del Sonar, que es el unico bloque dentro de la sección. Cambia en el segundo renglón que dice echo y pon un P1.

Ahora arrastra de la sección de “Básico” un bloque de la sección de Variables que diga “Distancia”, por último agrega un pausa al final y dale un tiempo considerable, unos 1000 ms.

Si todo salió bien ahora necesitas probar tu micro:bit. Para ello necesitarás conectar tu sensor a una alimentación de 5V. Ten mucho cuidado de no conectar cosas al micro:bit con 5V por que se pueden dañar. El diagrama de conexiones se vería de este modo.


Si quieres averiguar más del uso de los sensores ultrasonicos visita el tutorial de movimiento con Maqueen para micro:bit que te permitirá crear un robot que evade obstáculos.